
Publicado em 07/09/2016
Visando melhorias constantes no quesito segurança, com base em uma distância segura definida, é desenvolvido um protótipo que alerta o motorista da distância correta que se deve manter do automóvel que segue a frente. É utilizado um sensor dianteiro de monitoramento de distancia e um alarme sonoro, que mantém o condutor informado da redução dessa distância de segurança. A programação do protótipo é desenvolvida em linguagem scilab, onde a proposta é manter o condutor informado dessa proximidade entre seu veículo e o veículo da frente, assegurando tempo de ação. O objetivo principal deste trabalho é reduzir os acidentes causados por não guarda essa distancia segura.
1 INTRODUÇÃO
O que é à distância de segurança? É a distância mínima que dois veículos devem manter entre si, para que, no caso de uma frenagem brusca, não colidam um com o outro, ou seja, é a distância total percorrida por um veículo, desde que o condutor se apercebe do perigo, até o momento em que o automóvel para completamente, e, geralmente essa distancia é estimada com um intervalo de dois segundos do veiculo a sua frente. Esse tempo é o somatório do tempo de reação (relacionado com a distância de reação) com o tempo de frenagem (relacionado com o tempo de travagem) do veículo assim como pode ser visto na figura 1.
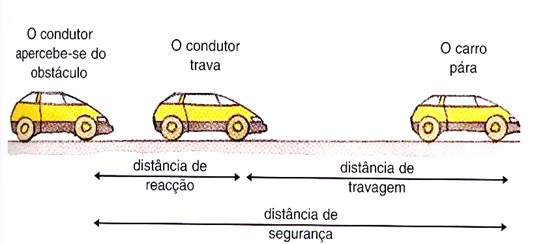
Figura 1 – Distancia de segurança
Fonte: Instituto da mobilidade e dos transportes terrestres, IMTT (2008).
Atualmente os automóveis estão mais seguros, utilizando-se dos componentes eletrônicos que auxiliam o motorista a controlar melhor seu veículo e com isso reduzir os acidentes. Vários são esses recursos que melhoram a segurança do veículo e podem ser de dois tipos: passivo e ativo. Dispositivos de segurança passivos são aqueles que agem quando o acidente ocorre e servem para reduzir os danos dos ocupantes. Um exemplo de sistema passivo é o air-bag, que é uma bolsa inflável que reduz o impacto do ocupante do automóvel contra o volante. O sistema do tipo ativo é aquele que age antes do acidente ocorrer, tentando evitá-lo. O Anti-blocking System (ABS), Sistema Anti-bloqueio, é um exemplo de dispositivo de segurança ativa em que um componente eletrônico atua na frenagem do veículo, evitando que as rodas travem em uma frenagem brusca. Esse sistema é muito interessante em pisos com pouca aderência, pois além de não deixar que as rodas travem, faz com que o condutor tenha controle do veículo [Bosch, 2008].
Dentro dessa vertente visa-se desenvolver um sensor do tipo ativo que auxilia o motorista quanto à manutenção de uma distância segura entre seu carro e o carro (ou obstáculo) a frente. Este sensor tem como finalidade emitir um sinal sonoro quando o condutor não guarda a distância segura.
2 OBJETIVOS
2.1 Objetivo geral
- Reduzir a taxa de acidentes causados por não guarda à distância de segurança.
2.2 Objetivos específicos
- Desenvolvimento de um sensor que faça o cálculo da distância de segurança em quaisquer circunstâncias.
- Transmitir uma informação clara ao condutor sobre a distância segura.
3 REVISÃO BIBLIOGRÁFICA
3.1 SENSORES
Sensores são elementos provedores de informações para os sistemas de automação industrial, residencial, automotiva e demais setores. Um sensor pode ser definido como um transdutor que altera a sua característica física interna devido a um fenômeno físico externo [Rosário,2005]. São recursos bastante utilizados atualmente no meio industrial, veicular, residencial entre outras áreas, permitindo que dispositivos eletrônicos tenham uma maior interação com o meio externo. Segundo Rosário, “Um sensor muda seu comportamento sob a ação de uma grandeza física, podendo fornecer direta ou indiretamente um sinal que indica essa grandeza e convertendo uma quantidade física em um sinal elétrico.” [Rosário, 2005]. Dentre os sensores, destaca-se o sensor de proximidade nos seus variados tipos: os magnéticos, o óptico e o ultra-sônico. Os sensores magnéticos são feitos em material ferro-magnético (ferro, níquel etc) e são acionados quando há uma variação do campo magnético. São largamente utilizados em sistemas onde é necessário identificar fim de curso e são classificados como capacitivos ou indutivos. Os indutivos identificam a alteração do campo magnético de materiais metálicos enquanto os capacitivos identificam a alteração da capacitância campo elétrico em objetos metálicos e não-metálicos. Este tipo de sensor não se aplica a este projeto, pois a distância identificada por ele é pequena, na faixa de alguns milímetros. [Rosário, 2005]. O princípio de funcionamento de um sensor ultra-sônico é semelhante ao dos sonares usados em embarcações. Estes sistemas funcionam da seguinte forma: Um sinal ultra-sônico é emitido em determinada direção e este sinal sonoro rebate em algum obstáculo sendo refletido e captado pelo sensor
3.1.1 Laser
Um laser é um aparelho que amplifica a luz para produzir um feixe intenso e fino de ondas, com uma cor muito pura. As fontes de luz comum são incoerentes, isto é, são emitidas em comprimentos de ondas diferentes e com as mais diversas relações de fase. Mesmo quando se usa luz com quase o mesmo comprimento de onda, como a luz amarela de uma lâmpada de vapor de sódio, ainda existe uma relação variada de fase. O resultado é que os feixes luminosos desse tipo se espalham muito rapidamente, e também, grande parte de energia se perde por interferência destrutiva. Em 1954, os físicos desenvolveram um método para produzir ondas coerentes na região das micro-ondas. Esse dispositivo foi chamado de maser. Seis anos depois, os princípios do maser foram aplicados para a região ótica. Um maser ótico é chamado laser como mostra a figura 2.
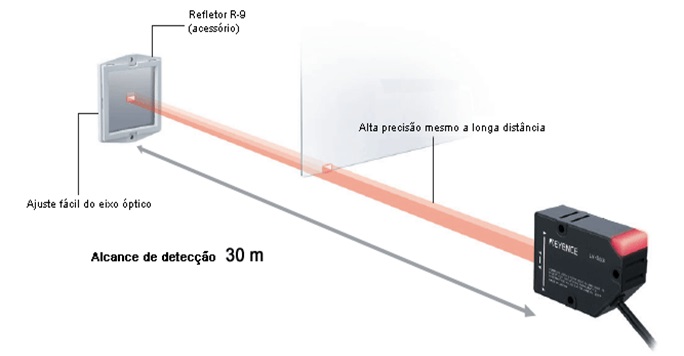
Figura 2 – Laser
Fonte: SCHOENKNECHT, Eduardo, (2010)
Depois que um feixe luminoso parte do laser, pode ser mais concentrado ainda, por meio de dispositivos de focalização. A potência desses raios laser pode ser de vários milhões de watts, não sendo, portanto, de surpreender que a luz laser corte metal e que possa ser refletida da Lua como um feixe de radar. A tecnologia do laser também está sendo aplicada a comunicações a longa distância e ao processamento de dados. Você também pode encontrar o laser em leituras ópticas, nos verificadores de preços dos produtos em supermercados e nos mais modernos vídeos e discos.
3.2 SENSOR DE CHUVA ARDUINO
O Sensor de chuva é um produto desenvolvido com propósito de uso em automatizações diversas, como controle industrial, casas inteligentes ou em qualquer outro projeto que necessite de tal função. A ideia principal é utilizar um sensor que detecte a presença de chuva, enviando os dados para sua plataforma central, que poderá estar distante do sensor, sendo este compatível com toda família Arduino e toda família PIC [Sick, 2015]. A conexão do sensor é realizada através de um pino digital do Arduino ou através de uma porta analógica.
O sensor de chuva para Arduino é um componente com duas partes: a placa do sensor, formada por várias trilhas resistentes à oxidação, que vão detectar o nível de líquido que está atingindo a placa, e o módulo com chip comparador LM393, que é o responsável por ler as informações desse sensor e enviar os dados pelas pinosA0 (analógico), ou D0 (digital – valores 0 e 1).
Esse módulo também tem um potenciômetro para ajuste de sensibilidade, um led vermelho para indicação de ligado, e um led verde que indica a transmissão de dados com forme mostrado na figura 3:
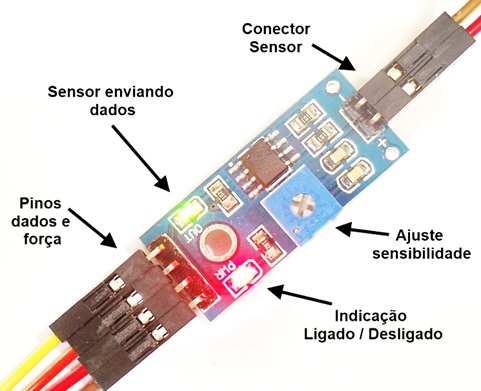
Figura 3 – Componentes do Sensor de Chuva Arduino
FONTE: ALEXANDRE,André Sobral Gomes Pontes. (2013)
Sendo assim pode se utilizar um motor ligado à saída digital para abrir (sem chuva – nível HIGH) ou fechar (com chuva – nível LOW) uma janela quando for detectada chuva, já com a saída analógica você pode abrir uma válvula ou acionar uma bomba dependendo da intensidade da chuva, lendo os valores de 0 a 1023 fornecidos por essa porta.
3.3 ALGORITMO
O algoritmo trata a possibilidade de propor a solução para um problema. O primeiro passo é analisar o problema, isto é, definir os limites e por em formato numa linguagem descritiva, geralmente falamos de análise para descrever o processo pelo qual o problema é formalizado. A linguagem de descrição usada para escrever o resultado de análise, é chamada de algoritmo. O próximo passo é traduzir o algoritmo em uma linguagem de programação específica, trata-se da fase de programação. Nessa etapa é feita o intermédio entre o humano e a máquina, permitindo que o usuário escreva em uma linguagem próxima à da máquina. Torna-se mais compreensível para o ser humano, as operações que o computador deve executar. Assim, como a linguagem de programação é destinada ao computador, ele deve respeitar uma sintaxe estrita. No entanto, um algoritmo pode levar a vários programas.
O programa é, então, convertido em linguagem de máquina durante uma etapa chamada compilação. A compilação é uma fase realizada pelo próprio computador graças a outro programa chamado compilador.
A próxima fase é chamada de edição de links, e consiste em ligar o programa com todos os elementos externos (geralmente as bibliotecas a que se refere).
3.3.1 Características de um algoritmo
O algoritmo é uma forma de o programador apresentar a sua abordagem do problema para outras pessoas. Na verdade, um algoritmo é o anunciado, em uma linguagem bem definida, de uma sequência de operações para resolver o problema. Assim sendo, um algoritmo deve ser:
- Legível: o algoritmo deve ser compreensível até por um leigo
- De alto nível: o algoritmo deve poder ser traduzido em qualquer linguagem de programação, ele não deve fazer uso de conhecimentos técnicos relativos a um determinado programa ou a um sistema operacional dado.
- Preciso: cada elemento do algoritmo não deve ser confuso, por isso é importante eliminar qualquer ambiguidade.
- Conciso: um algoritmo não deve exceder uma página. Se for o caso, é preciso decompor o problema em vários subproblemas.
- Estruturado: um algoritmo deve ser composto de diversas partes facilmente identificáveis.
4 METODOLOGIA
A princípio definiu-se uma sequencia para a montagem do sensor. Elaborando uma ordem lógica para seu desenvolvimento, onde cada etapa se mostra fundamental na coleta de dados, e de maneira apropriada para que o algoritmo absolvesse essas informações, e fosse capaz de repassar os dados para o condutor, através de um sinal indicativo, informando se estava ou não guardando a distancia segura do veiculo a frente. Segui-se assim com a ordem cronológica mostrada na figura 4.
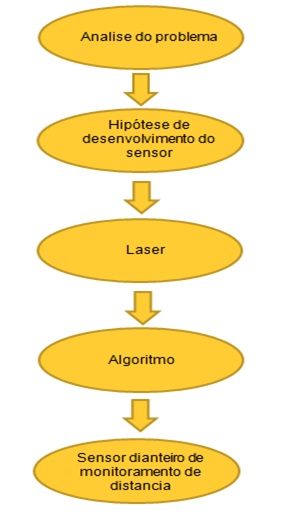
Figura 4 – Fluxograma.
Diante da proposta partiu-se pra uma vertente que determina a pesquisa para o que é distancia segura?
Distância segura é manter 2s do automóvel que segue a frente para velocidade de até 90 km/h, segundo manual de direção defensiva do DENATRAN. [DENATRAN, 2005].
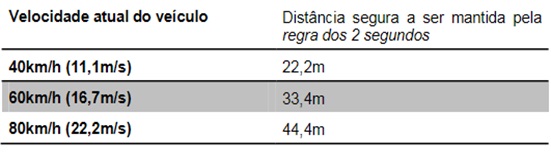
Dada por uma contagem de dois segundos de um ponto fixo do motorista da frente ate o condutor, sendo essa contagem iniciada a partir da sequencia, cinquenta e um, cinquenta e dois. Na tabela 1 verificamos alguns exemplos para as variadas velocidades e sua distancia segura:
Tabela 1 – Distancia de segurança.
Através dessas informações já conhecida surgiu à proposta de um sensor que calculasse esse tempo com maior precisão, evitando que o motorista se distraia com a contagem dos dois segundos.
O sensor dianteiro de monitoramento de distancia de segurança consiste em um algoritmo capaz de calcular a distancia de segurança através das inovações extraídas dos sensores.
O sensor a laser é capaz de fornece a informação de distancia entre o veiculo em questão e o veiculo a frente, conforme a figura 5.
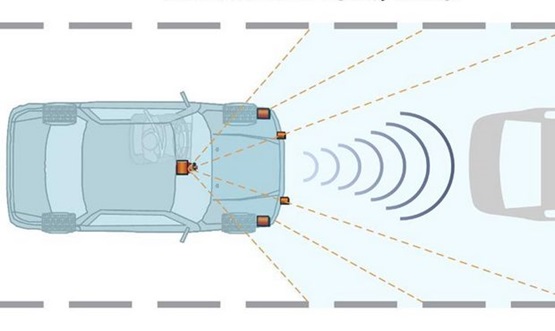
Figura 5 – Sensor laser.
Sendo que a escolha desse sensor se deu a fácil aplicação e seu baixo custo de aquisição. Sendo que o sensor tem fácil aplicabilidade no trabalho e seu sinal não é prejudicado pelas intempéries climáticas uma vez que seu feixe de luz é mais estável que a onda do sensor ultrassônico.
O sensor de chuva Arduino é responsável pela informação de intempéries climáticas, parte fundamental para nosso trabalho. Devida às alterações apresentadas no asfalto quando o mesmo está molhado, deve ser adicionado um coeficiente de segurança nos cálculos devida à perda de aderência no asfalto.
Por fim depois que essas informações foram inseridas no banco de dados dos sensores no algoritmo o mesmo tem como saída de dados a informação que diz qual a condição do condutor quanto a distancia, sendo essa informação emitida por sinal sonoro e luminoso.
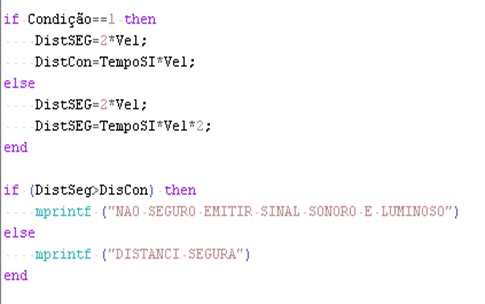
Figura 6 – Parte do código responsável pelo cálculo da distância de guarda.
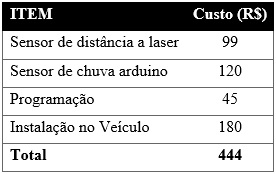
O sensor foi desenvolvido para aumentar a segurança do condutor, e ao mesmo tempo ser acessível a todos. Dessa forma o custo para o material e para o dispositivo é disposto na tabela 2:
Tabela 2 – Custo do sensor de monitoramento de distancia de segurança.
5 CONCLUSÃO
Conclui-se que o desenvolvimento desse projeto visa aumentar a segurança do condutor, com a finalidade de reduzir os acidentes causados por colisões traseiras, uma vez que o mesmo oferece ao condutor, informações precisas quanto à manutenção de uma distância segura entre seu carro e o carro à frente, através da emissão de um sinal sonoro. Diante do exposto vimos que o sensor dianteiro de monitoramento de distância é eficaz, e ao mesmo tempo acessível a todos. Com um custo relativamente baixo podendo ser adquirido como item de fabrica ou acessório.
6 REFERENCIAS:
- BOSCH – Freie com maior segurança com o Antilock Braking System ABS (sistema antibloqueio de frenagem) –kwin.bosch.com/br/pt/safety_comfort/drivingsafety/abs/brakemoresafely.html Acessado em setembro de 2015.
- DENATRAN e Fundação Carlos Chagas. Manual Básico de Segurança no Trânsito. – Cap. 4 – http://www.anfavea.com.br/documentos/indicesegurança.pdf. – Acessado em 2015.
- IMTT -Instituto da mobilidade e dos transportes terrestres, http://www.imtt.pt/sites/imtt/portugues/ensinoconducao/ManuaisEnsinoConducao/Paginas/ManuaisdeEnsinodaConducao.aspx Acessado em 2015.
- ROSARIO, Joao Mauricio – Princípios de Mecatrônica São Paulo : Pearson , 2005
- SICK, Sensor Intelligence – http://www.sick.com.br/br/produtos/sensoresindustriales/sensoresultrasom/pt.html – Acessado em setembro de 2015.

Autor:
Magna Neves. E-mail para contato: magneves1@gmail.com
Phelipe Júnio. E-mail para contato: phelipegpjunio@hotmail.com
Paulo Guimarães de Moraes. E-mail para contato: paulo.guimaraes@prof.unibh.br
Centro Universitário de Belo Horizonte, Belo Horizonte, MG.
Se você tem comentários, sugestões ou alguma dúvida que gostaria de esclarecer, aproveite o espaço a seguir.
Ainda não recebemos comentários. Seja o primeiro a deixar sua opinião.




Deixe uma resposta